报告摘要:
触觉传感器分为分层式触觉传感器和磁电式/视触觉传感器。分层触觉传感器包括压阻式、压电式和电容式传感器,由敏感层、电极层、基地层、封装层、粘合层构成。敏感层位于最上层,由具备力敏响应的功能材料构成(如PDMS/碳纳米管等),基底层采用PI或者Ecoflex等柔性弹性体,提供整体结构的机械结构支撑和可恢复形变能力。封装层采用PDMS薄膜等,用于保护内部电路免受湿度、氧化和污染。其他触觉传感器主要分为视触觉传感器&磁电式触觉传感器。
如何看待人形机器人触觉传感器技术方案演化?(1)压电/压阻式性价比高,技术成熟,基础的传感器模块仅可以测量法向力,若测量切向力需要复杂传感器结构采集不同坐标点数据并利用加强算法解藕,我们预计非精密场景人形机器人灵巧手以及大多数人形机器人手掌/小臂/双足等将首选压电/压阻/电容方案;(2)磁电&视触觉适配高精密场景,比如实验室等,磁电式可以直接测量三维力和力矩,但是需要将磁石精准定位到晶格,生产工艺复杂,磁电式成本较高,并且无法适配强磁场环境。视触觉除了六维力之外甚至可以感知纹理/温度等其他物理信息,但算力要求极高。
如何看待核心厂商竞争壁垒?材料+算法+半导体级制备工艺+客户渠道缺一不可。
(1)电子皮肤材料端包括活性层/基材/电极,活性层材料为决定触觉传感器敏感性的关键,主流工艺为将碳纳米管/石墨烯等导电材料复合进PDMS等弹性体。活性层材料需要对特定刺激产生可测量的电信号变化
(电阻/电容/电压/电流/频率等),是决定触觉传感器灵敏度的关键要素,材料端具有深刻理解的玩家具备布局电子皮肤的一定优势。
(2)触觉传感器中常用的信号处理算法,包括降维算法、时频分析算法和分类算法。
(3)电子皮肤最为常见形态为多层堆叠结构,感知层+介电层+基材通过涂布等工艺垂直叠加,使用导电材料在柔性基底上制造导线和简单的电路单元,电路制备需要丝网印刷/3D打印/激光转印/沉积刻蚀等半导体级别工艺,涂布+丝印等工艺同样构成壁垒。
应用点位逐步提升,我们测算2030年人形机器人电子皮肤市场空间有望达到155亿元。伴随技术走向成熟以及成本下降,我们预计灵巧手电子皮肤触点有望从五个指尖转向手掌+指腹全覆盖,我们测算灵巧手电子皮肤市场空间2030年有望达到50亿元。目前手臂/双腿/脚掌等其他部位电子皮肤尚未覆盖,成本下降后电子皮肤应用范围有望进一步提升,我们测算2030年人形机器人电子皮肤总体市场空间有望达到155亿元。
推荐标的:晶华新材
相关公司:安利股份/天安新材/汉威科技/福莱新材/日盈电子(上述公司
均未覆盖,不构成投资建议)
风险提示:技术进步不及预期;降本进度不及预期;竞争格局恶化
1.触觉方案百花齐放
1.1.压阻/压电/电容等基础方案性价比高,叠加算法可以测量切向力
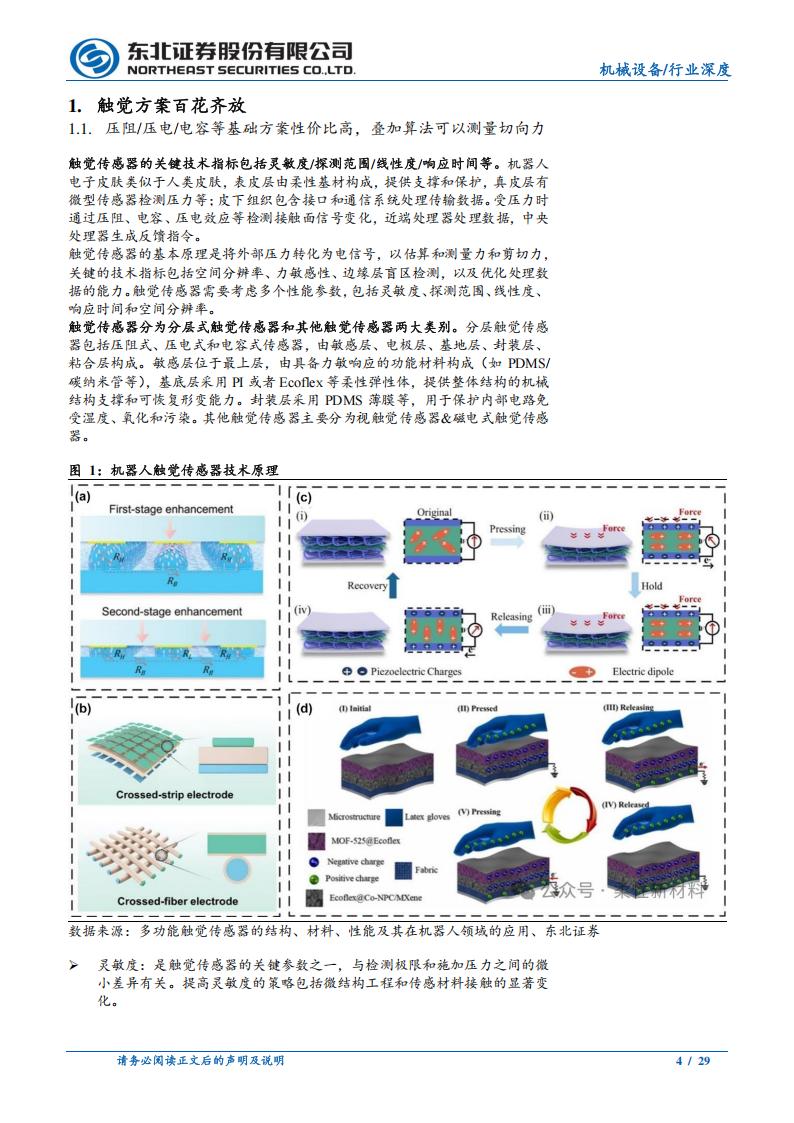
触觉传感器的关键技术指标包括灵敏度/探测范围/线性度/响应时间等。机器人电子皮肤类似于人类皮肤,表皮层由柔性基材构成,提供支撑和保护,真皮层有微型传感器检测压力等;皮下组织包含接口和通信系统处理传输数据。受压力时通过压阻、电容、压电效应等检测接触面信号变化,近端处理器处理数据,中央处理器生成反馈指令。
触觉传感器的基本原理是将外部压力转化为电信号,以估算和测量力和剪切力,关键的技术指标包括空间分辨率、力敏感性、边缘层盲区检测,以及优化处理数据的能力。触觉传感器需要考虑多个性能参数,包括灵敏度、探测范围、线性度、响应时间和空间分辨率。
触觉传感器分为分层式触觉传感器和其他触觉传感器两大类别。分层触觉传感器包括压阻式、压电式和电容式传感器,由敏感层、电极层、基地层、封装层、粘合层构成。敏感层位于最上层,由具备力敏响应的功能材料构成(如PDMS/碳纳米管等),基底层采用PI或者Ecoflex等柔性弹性体,提供整体结构的机械结构支撑和可恢复形变能力。封装层采用PDMS薄膜等,用于保护内部电路免受湿度、氧化和污染。其他触觉传感器主要分为视触觉传感器&磁电式触觉传感器。灵敏度:是触觉传感器的关键参数之一,与检测极限和施加压力之间的微小差异有关。提高灵敏度的策略包括微结构工程和传感材料接触的显著变化。
本文来自知之小站
报告已上传百度网盘群,限时15元即可入群及获得1年期更新
(如无法加入或其他事宜可联系zzxz_88@163.com)
