夹持器:性价比高,稳定性高。1)定义:夹持器是抓持物体进而操控物体的装置,模仿的是手指的夹持运动。2)结构:应用于机器人的末端夹持器一般采用电机或气缸作为驱动,机构原理以多连杆机构和气缸为主。3)工作原理:当气缸充气时,夹持器夹指将接近物体并牢牢抓住物体,以便执行其他操作,而当充气方向改变时,夹持器将松开该物体。4)特点:两指夹持器结构简单,运动形式单一稳定,工作可靠。在工业现场被大量应用于目标零部件的夹取、搬运、换位、装配等工位。当然,其不足之处也显而易见:缺乏手指的灵活性,不能对复杂形状的目标进行抓持,更无法对目标物体实施操作。
多指灵巧手:可实现复杂操作,泛化能力强。1)定义:多指灵巧手是拥有多指多关节(普遍手指数目为3-5个)的装置。2)结构:以北京因时机器人科技有限公司的RH56BF3仿人型多指灵巧手为例分析,具有6个驱动器和5个接触力传感器;3)工作原理:灵巧手以电机等为动力源,通过关节(转动副)完成手指的弯曲、伸展和抓取等动作。4)特点:相较于夹持器,多指灵巧手能够实现更复杂更多样化的工作,泛化能力更强,适用于家用领域,缺点在于价格昂贵,技术相对不成熟。夹爪:在工业应用场景中,夹爪凭借其高稳定性和低成本优势成为更实用的选择。与灵巧手相比,夹爪虽然功能相对单一,但其简单的操作特性和成熟的控制算法能够充分满足工业生产对可靠性和良品率的严格要求,且更具成本效益。工业领域通常更注重设备的实用性和经济性,而非追求多功能性,这使得夹爪成为更符合实际需求的选择。
灵巧手:灵巧手具有更强的适应性和操作灵活性,能够执行更复杂的任务,如精细抓取和手指协同动作。从长远发展来看,随着人形机器人技术的进步,灵巧手有望成为最终解决方案,因其能更好地适应多样化的人类生活环境。
自由度是灵巧手与夹爪的核心差异。我们认为灵巧手更高的自由度带来了更强的操作能力,但也对控制算法提出了更高要求,这使其在现阶段难以实现产业化应用。当前技术条件下,灵巧手的产业化仍面临挑战。
人手的结构较为复杂,是人类自由度最多的器官,能够完成多种灵巧的动作。正常的人手有19块骨头,包括14块指骨和5块掌骨。人手共有五根手指,其中拇指由两块指骨和一块掌骨组成,其余四根手指都由三块指骨和一块掌骨组成。除拇指外每根手指都有DIP(远侧指间关节),PIP(近侧指间关节),MP(掌指关节)和CMC(腕掌关节)四个关节。
单手的独立活动关节(自由度)共21个。从结构上,远侧指间关节和近侧指间关节形成了转动副,掌指关节形成了球形副。转动副在平面上仅能转动,在空间有1个自由度;球形副在空间中有2个自由度。因此人手单根手指在空间中有4个自由度,可以实现两种运动方式,转动副可以实现弯曲/伸展运动,球形副不仅可以实现弯曲/伸展运动,还能实现侧摆运动。因此单手21个自由度中,拇指5个自由度(掌指关节2个、指间关节3个),其余四指各4个自由度(每个手指的掌指关节和指间关节)。
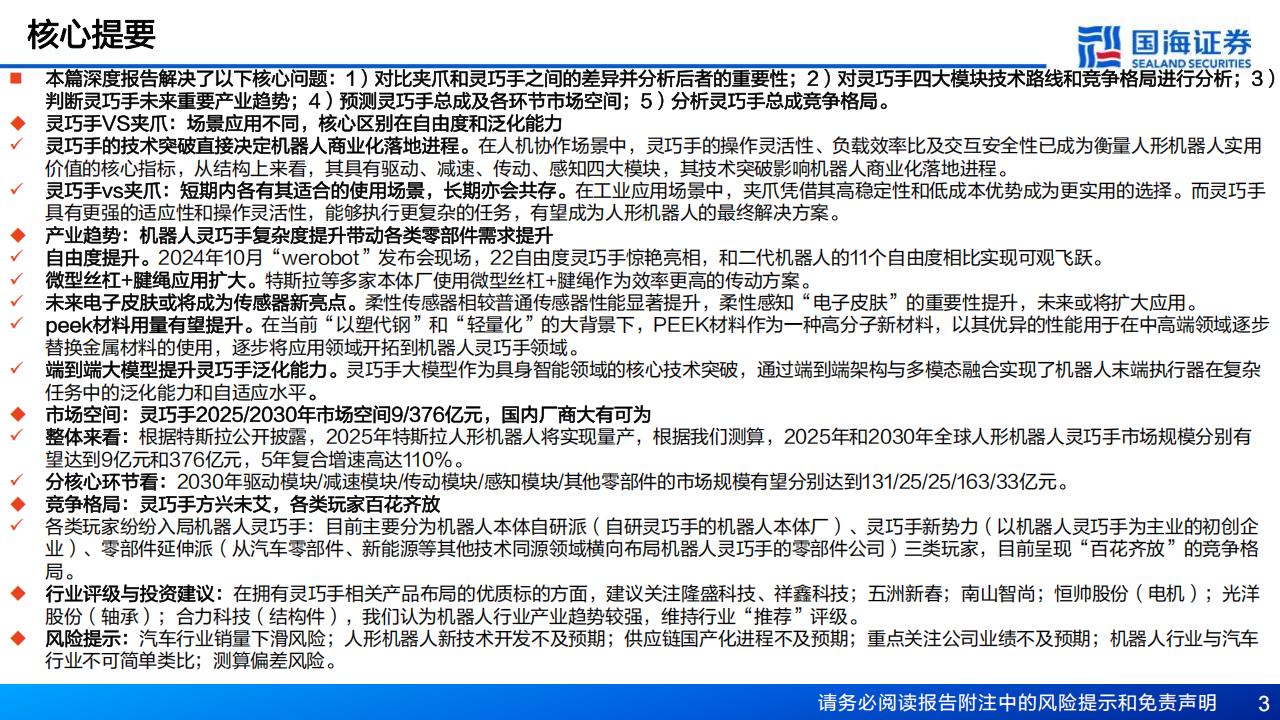
灵巧手类人手设计,具有驱动、减速、传动、感知四大模块,其技术突破影响机器人商业化落地进程。在人机协作场景中,灵巧手的操作灵活性、负载效率比及交互安全性已成为衡量人形机器人实用价值的核心指标,从结构上来看,其具有驱动、减速、传动、感知四大模块,其技术突破影响机器人商业化落地进程。
本文来自知之小站
报告已上传百度网盘群,限时15元即可入群及获得1年期更新
(如无法加入或其他事宜可联系zzxz_88@163.com)
