1.投资建议
触觉传感为灵巧手落地关键,灵巧手为人形机器人硬件侧落地核心。无触不成手,触觉主要反馈接触物状态与力感知两个维度的信息。人类约98.7%的工作需要手的灵活性和手指精细操作的加持,无灵巧手则无实际应用价值的人形机器人。仿生为机器人触觉的最优解,模仿人类皮肤设计三明治结构,柔性衬底层(PDMS等弹性材料)、活性传感层(石墨烯、碳纳米管等材料)、电极层。
触觉传感百家争鸣,市场格局未定,具备多技术路线融合能力的平台公司更具竞争力。触觉传感技术路线众多(压阻、电容、压电、磁电霍尔效应、光学、摩擦电和视触觉等),各路线在实际落地中均存在性能与成本端瓶颈。当前国内产业落地端电容与磁电霍尔效应占优,未来或呈现多技术路线融合取长补短。触觉传感绝大部分玩家尚未上市,按主流技术路线大致分为压阻(Interlink、Tekscan.SPI、汉威科技、福菜应材、日盈电子、墨现科技等)、电容(PPS、他山科技、汉威科技等)、磁电霍尔效应(XELA、帕西尼等)、视触觉(Gelsight、千觉、纬钛、戴盟等)四类;按背景大致分为上游材料企业(福莱新材等)、传感器老牌公司(汉威科技等)、探索前沿路线的初创企业(他山科技、帕西尼、千觉、纬钛、戴盟等)、下游应用企业(申昊科技等)四类。适配机器人的柔性触觉传感器的生产需要材料、制造与算法端复合能力,切入壁垒较高。此外柔性触觉传感器未来或朝阵列化、多模态融合、边缘计算和自供电等方向发展。
人形机器人产量至1亿台时,触觉传感或迎万亿蓝海。根据VMR预测,全球触觉传感器市场规模2024年为153.3亿美元,预计2031年将达355.9亿美元,CAGR12.8%。主流技术路线为压阻和电容,各占37%和28%。主要下游为制造业/航空航天&国防/汽车,占比分别为42%/27%/17%。人形机器人应用方兴未艾。现阶段,各家人形机器人本体企业及灵巧手企业均处于在灵巧手端落地触觉的初期阶段,整体仍处于L3及以下水平,类似人类儿童(4-7岁)水平,开始发展精细动作技能、具备抓取柔性物体能力、可执行短流程任务。灵巧手为触觉落地第一环,而后伴随处理任务复杂度提升及应用场景拓展(工商业到家庭),触觉将逐步从手向手臂、足部、躯干和脸部等部位延伸,有望成为人形机器人零部件中极抗通缩领域。根据我们测算,当人形机器人产量达到1000万/1亿台时,对应触觉传感器市场规模(考虑各技术路线融合)分别约为0.24/1.18万亿元。若仅考虑单一技术路线占据全部市场测算,当人形机器人产量达到1亿台时,各技术路线对应的市场规模分别为:压阻3010亿元、电容约1.25万亿元、磁电霍尔效应约2.5万亿元、视触觉(VBTS)约3.76万亿元。
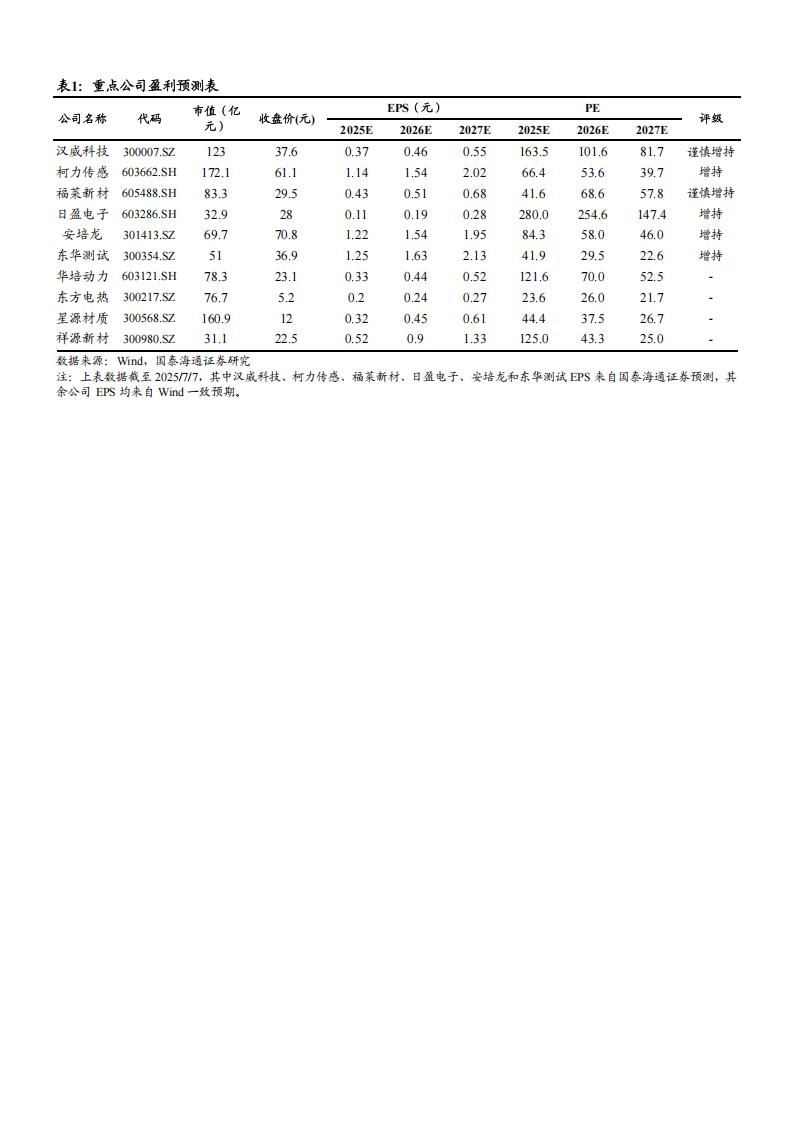
投资建议:对通用任务机器人的追求使得手部操作能力成为重点提升项。可执行多任务的手部操作能力依赖心灵手巧的机器人,其中灵巧手为人形机器人落地的硬件侧核心,而无触不成手。触觉传感百家争鸣,未来具备多技术路线融合能力的平台公司更具竞争力。触觉传感具备从手指向手掌、手臂、足部、躯干和脸部延伸的潜力,为人形机器人未来放量过程中极抗通缩的领域。当人形机器人年产量至1亿台时,触觉传感将迎来万亿蓝海。触觉传感领域投资机会值得重点关注,包括传统传感器厂家延伸布局至触觉传感、当前触觉传感器厂商收购其他技术路线向平台型迈进、触觉传感器材料厂商等。推荐标的:汉威科技、柯力传感、福莱新材、日盈电子、安培龙、东华测试。相关标的:华培动力、东方电热、样源新材、星源材质。
触觉传感是机械手灵巧化的核心,技术路线尚未收敛2.1.仿生为触觉传感的最优解
无触觉则无灵巧手,无灵巧手则无实际应用价值的人形机器人,
1)触觉的本质在于提供反馈,手无反馈则无法处理各类日常任务,进而不足以称之为灵巧手,触觉为仅次于视觉和听觉的重要感知手段,广义触觉包括力觉、冷热觉、痛觉等与接触有关的感觉,狭义触觉则仅考虑力觉。当前对于灵巧手触觉的探讨仍聚焦狭义触觉,本文也照此展开。聚焦力觉的触觉感知与反馈两个层面的信息:①接触物的状态,包括形状、刚度、纹理等信息;②对接触物的力感知,核心包括法向力(垂直于人手皮肤)、切向力(平行于人手皮肤)及其动态变化、接触物的位姿。法向力用于感知物体硬度及抓握时的力度判断等。切向力用于感知滑动趋势及物体表面纹理等。无触觉反馈,则手的运动和力将难以控制。以拿水杯为例,无触觉反馈则可能因无法感知水杯重量而导致水杯从手中滑落。故手无触觉不足以称为健全的手,无法完成日常任务。
2)人类无手不足以称为智人,人形机器人无灵巧手不足以走入千家万户。人类自猿猴进化至今,最大的进步之一在于解放双手,解放双手之后学会使用工具,进而逐步演化成为智人。根据美国劳工部对1000多个职业的统计与分析,工作中最重要的三个身体要求排序为类人感知、双手灵巧和移动性,其中98.6%的工作需要人类手的灵活性和手指的精细操作。此外,根据美国疾病控制与预防中心的统计,11.1%的人口患有行动障碍,许多轮椅、踏板车、手杖和助行器使用者仍然积极参与劳动力市场,为经济带来巨大利益,工人的价值主要不由双腿决定。当前,人形机器人发展除大脑外的另一个核心点为灵巧手,没有灵巧手则人形机器人无法完成洗衣、做饭、端茶倒水等人类日常工作,则无法走进千家万户。人类皮肤:多维感知的自然杰作,人手历经时间检验,堪称自然杰作。人形机器人的触觉模仿人手皮肤为当前最行之有效的途径。人体皮肤是一个由可变形的肌肉和脂肪系统支撑的复杂结构,呈现多层、非线性、非均质和粘弹性的特点。人体皮肤将外部接触力转化为自身形变,通过内部的各种触觉感受器精确感知形变,通过神经末梢进行信息传递,由周围神经系统或中枢神经系统处理后给出反馈。
1)皮肤的感知构成:《Tactile sensing-from humans to humanoids》一文提
到,人类皮肤每平方厘米约226个机械感受器,据此估算,成年人指尖约有241个机械感受器,手掌有58个。人手的机械感受器包括帕西尼小体(Pacinian Corpuscle,又称环层小体)、鲁菲尼小体(Ruffini Corpuscle)、默克尔细胞(Merkel Cells)、迈斯纳小体(Meissner’s Corpuscle)四类。表皮分布默克尔细胞、迈斯纳小体和触觉神经末梢,真皮层分布帕西尼小体和鲁菲尼小体。①帕西尼小体:位于皮肤深层,空间分辨率(分辨接触物体最小细节与间隔的能力)为10mm+,感受高频振动方面有独特优势,有利于判断滑动与表面纹理。②鲁菲尼小体:长梭形位于真皮内,快速响应100-500Hz的高频动态范围下持续的压力、横向皮肤拉伸和皮肤滑动等外界刺激,实现切向力感知的重要功能,空间分辨率7mm+。③默克尔细胞:表皮基底细胞之间的突起物体,慢响应0.4-3Hz低频的空间变形,如持续的压力、曲面、边缘甚至尖角等外界刺激,空间分辨率最高可达0.5mm。④迈斯纳小体;位于表层皮肤中,快速响应3-40Hz中低频的外界刺激,空间分辨率3-4mm,可感知皮肤变形时间、低频振动、抓握控制等。鲁菲尼小体和默克尔细胞作为慢速适应(SA)机械感受器可通过在长时间刺激期间持续响应来感知静态力。
3)触觉感知的工作流:感知层(皮肤接受刺激,机械传感器发生形变产生电信号)>传输层(信号通过神经传输)>控制层(大脑感知刺激)。当皮肤与物体接触时会因刺激发生形变,大量机械感受器会将形变通过蛋白质介导转变为电信号,然后通过神经轴突沿着神经系统将电信号传递给大脑。感受器电信号的波动方向、幅度、持续时间等会带给大脑不同的刺激,大脑的高级联合皮层通过分析,会形成对被接触物体状态及力的感知。

本文来自知之小站
报告已上传百度网盘群,限时15元即可入群及获得1年期更新
(如无法加入或其他事宜可联系zzxz_88@163.com)
